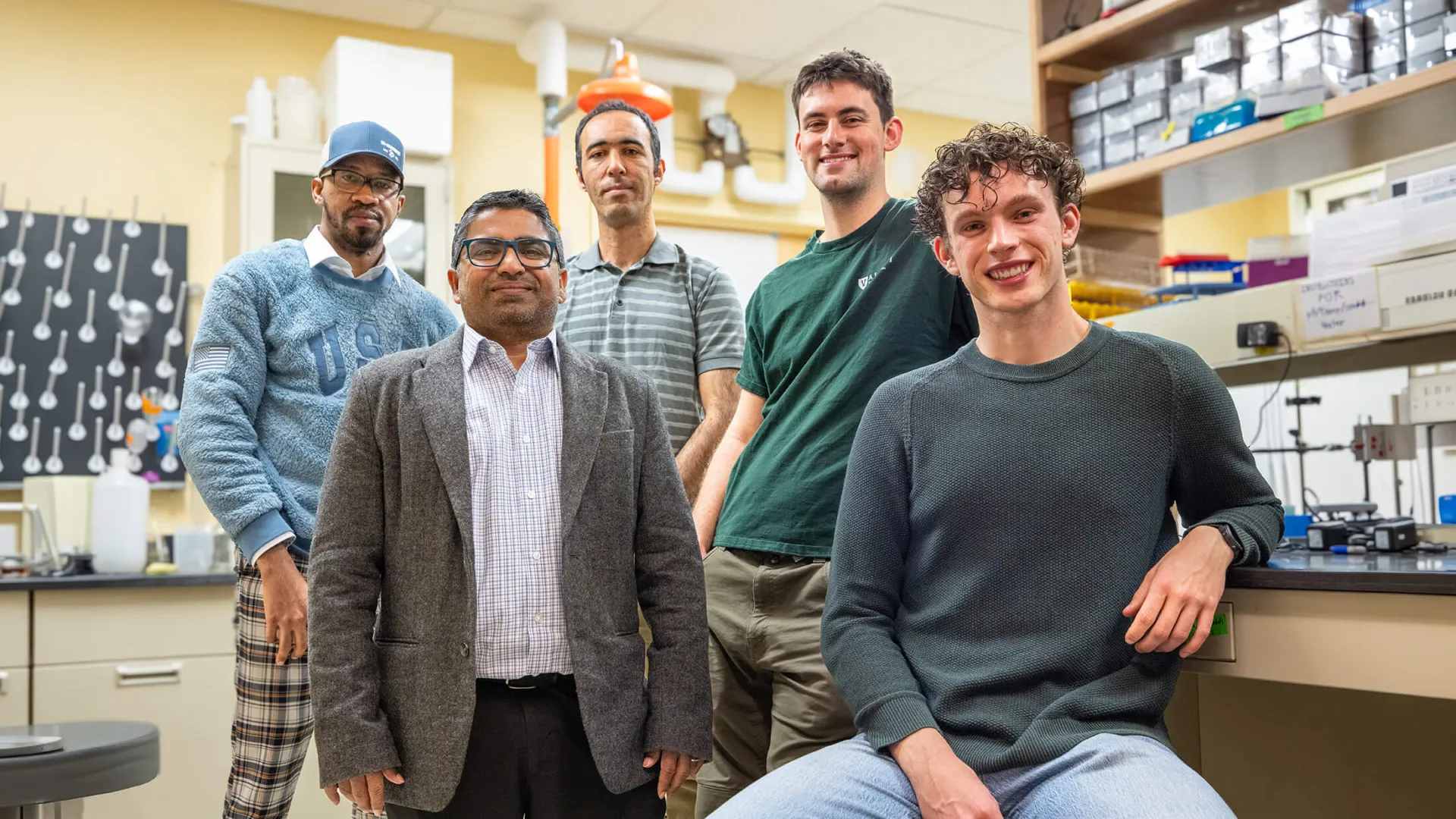
Our approach is personal, fostering a culture of collaboration that’s as driven by student-to-student connections as by our world-class faculty and advanced research opportunities. You may enter UVM a little unsure, eager, and excited for the next chapter. By the time you’re ready to leave, you’ll be poised to change the world.

Design Your Future
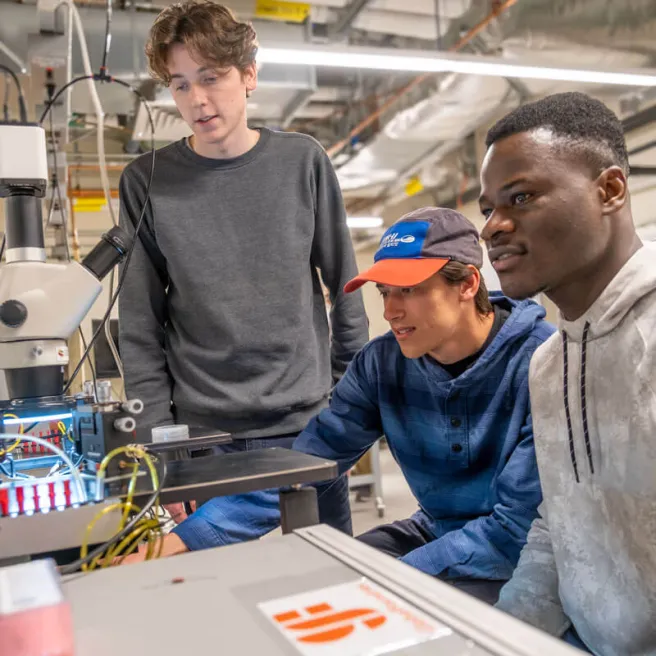
Explore and advance your knowledge in Computer Science, Mathematics, Statistics, Data Science, Physics, and Engineering. Our academic programs help guide you on your journey to solving the world’s—and our community’s—most pressing challenges.
Undergraduate programsacademics A hands-on, team-based approach




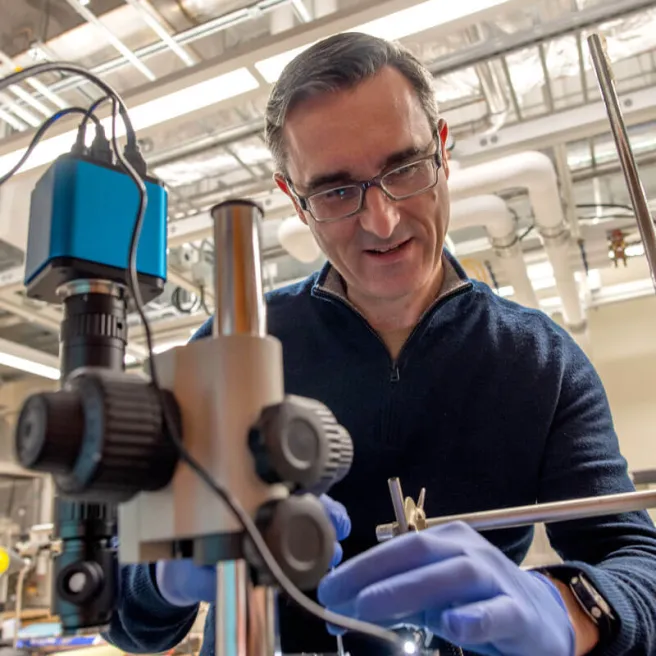
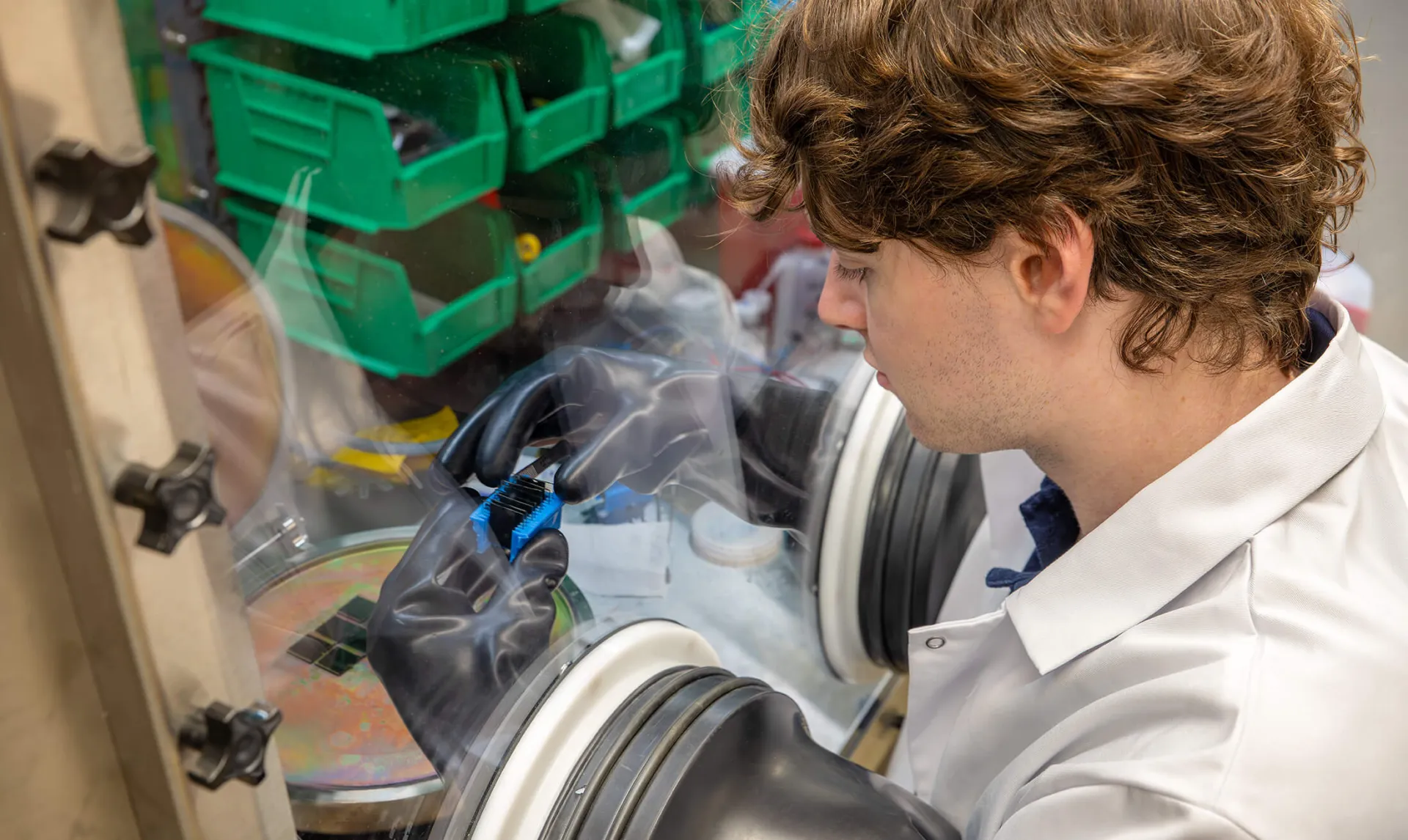
Cutting edge research
Proximity to the UVM Medical Center facilitates collaboration between students and faculty on cross-disciplinary projects, like developing biomaterials capable of healing punctured lungs and treating cancer, and advancing sensor technology to improve outcomes for joint replacement patients.
Research highlightsCutting edge research
Proximity to the UVM Medical Center facilitates collaboration between students and faculty on cross-disciplinary projects, like developing biomaterials capable of healing punctured lungs and treating cancer, and advancing sensor technology to improve outcomes for joint replacement patients.
Research highlightsBy the numbers
- 15 accelerated master's programs in STEM-related fields
- 8 petaflops supercomputer
- Top 10 "Most Innovative Tech Hub" - Forbes
In the news

From the Classroom to the Cloud Forest

Lighting the Spark: Future Scientists Inspired on Campus
Science or Sorcery? Transforming Sustainable Water Systems in the ALCHEMIST Lab

Record Number of 14 UVM Student Fulbright Winners are Announced, Ready to Exchange Knowledge and Skills Across the Globe
Senior Spotlight: Will Rekas
Quick Links by Audience